
Dynamic Positioning System
The Mega-Guard Dynamic Positioning System (DP) automatically controls a vessel’s heading and position
- Features
- Main advantages of the Mega-Guard Dynamic Positioning System
- Reference and models
- Joystick and Trackball panel
- Models
- DP Operator Workstation
- Scope of supply
- DP Controller
- DP Block Diagram
- Position Reference System
- Hydroacoustic and Taut Wire Position Reference
Features

The Mega-Guard Dynamic Positioning System (DP) automatically controls a vessel’s heading and position by activating thrusters based upon data as received from position reference systems, gyrocompasses, wind sensors and motion reference units. The Auto Track mode allows the ship to move along a pre-defined track at low speed as defined by the operator.
The Mega-Guard Joystick Control System (JC) is a basic version of the Mega-Guard DP system and allows the operator to automatically control the heading and manually position the vessel based upon data as received from gyrocompasses and wind sensors.
The Mega-Guard DP and JC system are based upon the field-proven products of the Mega-Guard product line and the experience as gained on the design and delivery of joystick control systems as supplied on many different kind of vessels since 1980 (see reference list).
The Mega-Guard DP and JC system are suited for e.g. supply vessels, tug boats, dredgers, cable and pipe laying vessels, FPSO's, heavy lift vessels and mega-yachts in full accordance with the applicable classification and IMO rules (DP1, DP2 and DP3).
Main advantages of the Mega-Guard Dynamic Positioning System:
- Accurate positioning with up to 1dm accuracy in combination with high accuracy position reference (GNSS, laser, radar) and thrusters.
- iSea trial tuning and testing can be limited to three days maximum. Parameter tuning is already done before shipment out of our factory by modelling of the ship and testing with a ship simulator.
- Extremely reliable hardware by using only solid state components and 24VDC power supply for all components within the DP system. All Mega-Guard DP hardware and software is designed and manufactured by Praxis Automation Technology and is applied in other Mega-Guard products as well (AMCS, VCMS, PMS, PCS, INS, etc).
- Various language options are available including Chinese, Japanese and others.
- Supports third party and own (Mega-Guard brand) position reference systems: Mega-Guard DGPS, GNSS with Seastar, Hydroacoustic Position Reference (HPR) and Taut wire Position Reference (TPR).
- Cost effective DP solution. Reliable hardware that is field proven on hundreds of vessels, allows for efficient off the shelf manufacturing in large quantities. As a result, we can offer our advanced Mega-Guard Dynamic Positioning System, including sensor package, at a very attractive price level. In addition, our customer's investment is supported by a world wide service network.
Reference and models
 Cable and pipe laying vessels (DP2)
Cable and pipe laying vessels (DP2)- Offshore supply vessels (DP1 and DP2)
- Ocean salvage vessels (DP2)
- Tug and work boats (DP1)
- Multi purpose vessels (DP1 and DP2)
- Platform crew boats (DP1)
- Passenger ferries (DP1)
- Jack-up platforms (DP1)
- Mega-yachts (DP0)
- Cruise ship (DP0)
Applicable classification: DNV, BV, LR, GL, ABS, CCS, RS, IRS, NKK.
Joystick and Trackball panel
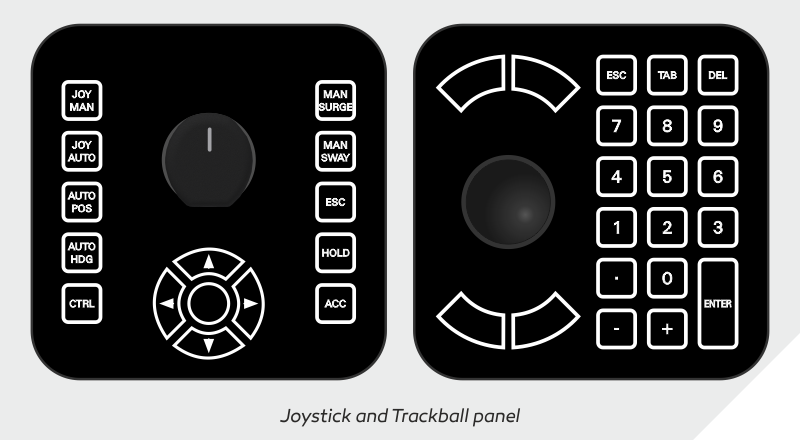 Control mode selection is executed with pushbuttons on the Joystick panel. Step adjustments of position and heading setpoints can be made on the Joystick panel as well. Larger size widescreen TFT's also allow for absolute entering of position (northings/easting or UTM) and heading (degrees) setpoints through the Trackball panel. Vessel behavior, sensor data and thruster data (setpoint and feedback) are shown on mimic diagrams on the widescreen TFT's. The following main Control Modes can be selected on the Joystick panel:
Control mode selection is executed with pushbuttons on the Joystick panel. Step adjustments of position and heading setpoints can be made on the Joystick panel as well. Larger size widescreen TFT's also allow for absolute entering of position (northings/easting or UTM) and heading (degrees) setpoints through the Trackball panel. Vessel behavior, sensor data and thruster data (setpoint and feedback) are shown on mimic diagrams on the widescreen TFT's. The following main Control Modes can be selected on the Joystick panel:
The following main Control Modes can be selected on the Joystick panel:
- Joystick Manual
- Joystick Auto Heading
- Auto Heading
- Auto Position (option on JC Workstation)
Various other modes can be selected on the DP Operator Workstation when the system is in Auto Position mode:
- Auto Position- Minimum Power Mode ;Weather Vane Mode
- Auto Position- Minimum Power Mode ;Positioning Circle Mode
- Auto Position-Joystick Manual Surge Mode
- Auto Position-Joystick Manual Sway Mode
- Auto Position-Joystick Manual Surge/Sway Mode
- Auto Track (low and high speed) Mode
- Track Follow Mode
In addition, the DP system can be used as a training system by entering the Simulator-Trainer mode. The Simulator mode can only be selected on the DP Operator Workstation when the DP and JC system are not active (thrusters in individual mode). The built-in Simulator-Trainer mode fulfills the rules of a Nautical Institute Class C simulator.
Models
- Mega-Guard JC: Joystick Control System with optional position holding capability
- Mega-Guard DP0: Dynamic Positioning System
- Mega-Guard DP1: Dynamic Positioning System with independent JC System
- Mega-Guard DP2: Dual redundant Dynamic Positioning System with independent JC System
- Mega-Guard DP3: Triple redundant Dynamic Positioning System with independent JC System
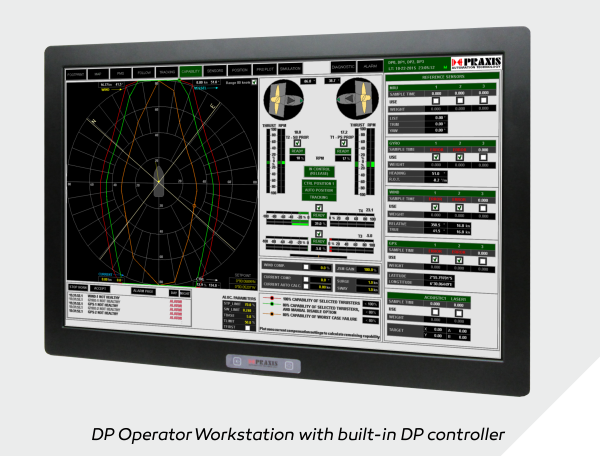
DP Operator Workstation
Operator mimics
 The DP Operator Workstation contains user friendly mimic diagrams which enable safe and accurate DP operations. The following main mimic diagrams are available:
The DP Operator Workstation contains user friendly mimic diagrams which enable safe and accurate DP operations. The following main mimic diagrams are available:
- Map (North pointing upwards)
- Diagram (bow pointing upwards)
- Capability
- Positioning sensors
- Other sensors
The following sections describe the various functions available within the mimic diagrams.
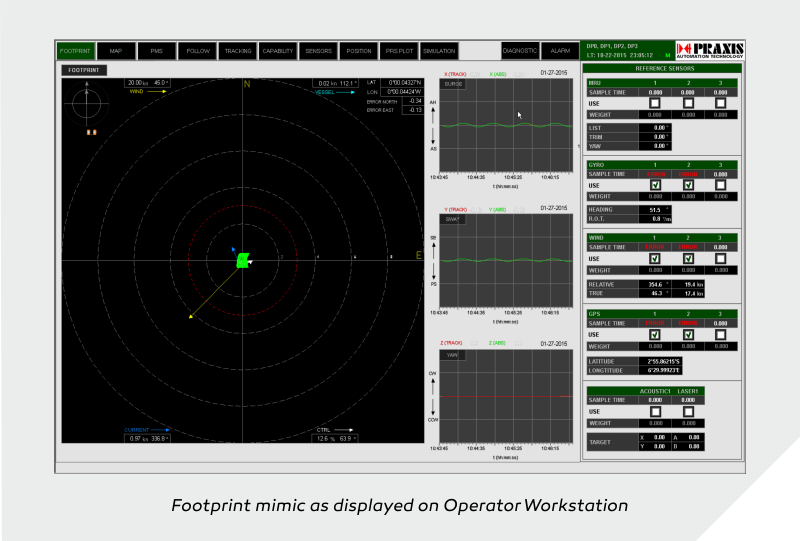
Diagram section
- Heading indication with rotating compass and rotating decimal degrees
- HDG (°) and ROT (°/min)
- Latitude / Longitude
- COG (°) and SOG (knot)
- Error X (m) surge and Error Y (m) sway
- Wind and current vectors relative
- Total thrust vector with thrust amplitude and direction
- Individual thrust indication for each thruster with amplitude and direction
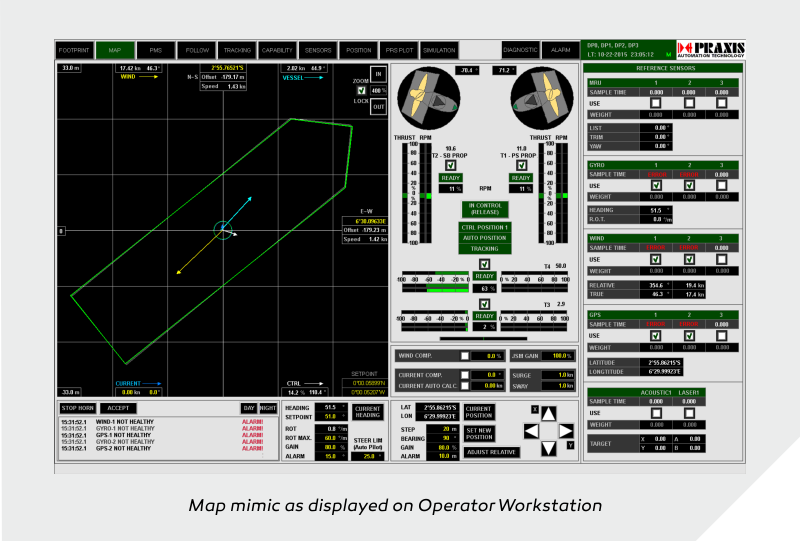
 Map section
Map section
- Heading indication with compass slider
- HDG (°) and ROT (°/min)
- Latitude / Longitude; map indication
- COG (°) and SOG (knot)
- Error North (m) and Error East (m)
- Vessel orientation, heading and movement
- SOG vector (green)
- Wind vector (yellow)
- Force vector (white); controller output
Thruster section
- Bargraph and numeric value for each thruster: setpoint and feedback
- An icon for each thruster showing thrust angle setpoint and feedback
- Thruster ready indication
- Heading controller output
- Station in control and Operating mode
Alarm area
- 6 rows for alarm display with alarm acknowledgement for each alarm
- Day/night vision selection
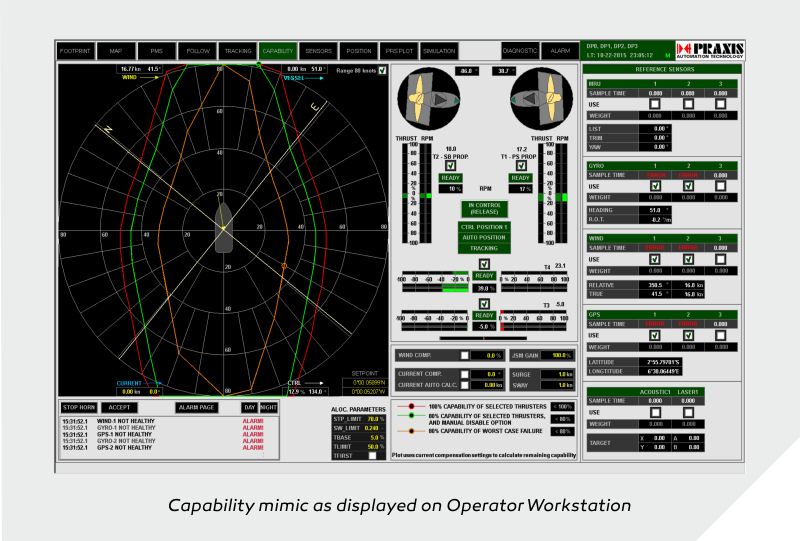 Capability section
Capability section
- Online X-Y plot of wind capability with selected thrusters and selected current value
- Capability plot with 80% thrust, 100% thrust and with worst case thruster failure
- Wind vector; direction and speed; if this vector reaches the capability boundries the vessel is out of capability
- Current settings
Sensor section
- Supports multiple position reference systems: DGPS, laser, radar, hydroacoustic, taut wire and winch
- Supports multiple sensors: gyro, wind and motion reference unit (MRU)
- Absolute (Northings and Eastings) or relative coordinates
- Sensor validation and weighing
Heading setting
- Heading setpoint (°) and ROT (°/min) maximum
- Alarm limit (°)
- Steer limit (°)
- Heading gain (%)
Environmental setting
- Wind compensation setting in between 0% and 100%
- Current direction (°)
- Current speed (knot)
- Check box to select or de-select automatic current compensation
 Position setting
Position setting
- Step (m) adjustment
- Bearing (°) adjustment
- Relative (X/Y) or absolute (N/E )
- Position setpoint mode
- Alarm limit (m)
- Set new position
- Up/down and Left/right step (m)
- Position gain
Joystick setting
The following parameters can be set:
- Joystick gain
- Display of thrust vectors to the thruster controller
Scope of supply
 General description
General description
The Mega-Guard Dynamic Positioning System consists of highly reliable (redundant) DP Operator Workstation and Thruster Controllers (one for each Thruster) which are interconnected by a redundant DP Ethernet network.
The central processing unit of the DP Operator Workstation consists of a DP Controller equipped with interfaces to the high brightness TFT screen, the redundant DP Ethernet network, the Joystick panel, the Trackball panel and (multiple) 8 channel NMEA Input modules for connection to Heading, Wind, Position and Motion Reference Unit sensors. The Mega-Guard Joystick Control System is identical with the Mega-Guard DP system.
Scope of supply
 The Joystick panel is equipped with a robust joystick which supports a rate of turn action as well. In addition, pushbuttons are available for mode selection and step adjustment of position setpoint (fore-aft, port-starboard) and heading setpoint.
The Joystick panel is equipped with a robust joystick which supports a rate of turn action as well. In addition, pushbuttons are available for mode selection and step adjustment of position setpoint (fore-aft, port-starboard) and heading setpoint.
The DP Operator Workstation can be operated by Trackball panel and/or Touchscreen. The Trackball panel is equipped with an operator friendly ergonomic trackball and numeric keypad for easy entering e.g. a position setpoint (northings/easting or UTM).
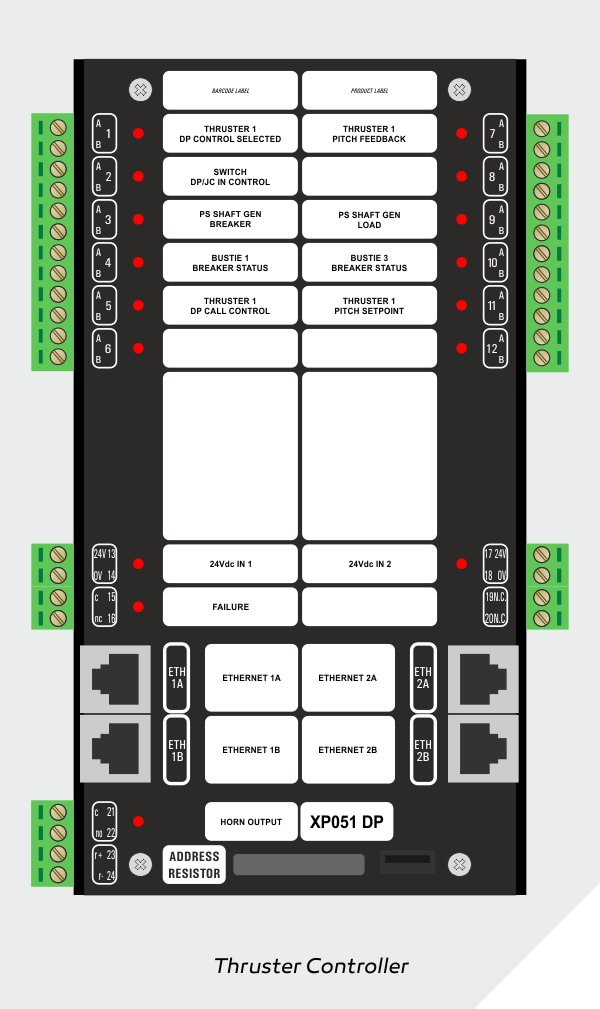
Each thruster is equipped with its own independent Thruster Controller and accepts any kind of thruster suitable for DP applications (e.g. CPP with rudder, azimuth thruster, tunnel thrusters etc). The Thruster Controllers provide a redundant DP Ethernet network interface to the (redundant) DP Controller. In addition, the Thruster Controllers are equipped with an independent and redundant JC Ethernet network interface to the JC Controller and include redundant isolated power supply inputs.
The Thruster Controllers are suitable for central installation on the bridge (all Thruster Controllers mounted in a single cabinet) or for de-central installation near each thruster (each Thruster Controller mounted on a DIN rail or in a single cabinet)
The redundant UPS powers the Mega-Guard DP System. A unique feature of the Mega-Guard DP system is that it is completely powered by 24VDC.
DP Controller
 DP Controller with extended Kalman filtering
DP Controller with extended Kalman filtering
The Dynamic Positioning controller is based on a detailed mathematical model of vessel motion in response to forces from thrusters, wind, waves and water current. The controller uses an extended Kalman filter for optimal estimation of vessel motions and environmental forces from wind, waves and current. The DP Controller is based on feedback from the motion variables where the oscillatory, wave-induced component is removed by the estimator. Feedback from the water current estimate provides the integral action of the system and feed forward from the wind force estimates are implemented.
The DP Controller keeps accurate heading and position control within the operator specified limits.
Reference sensors
The reference sensors are divided in the following categories:
- Position reference system; e.g. DGPS, GNSS, laser, radar, hydroacoustic and taut wire.
- Heading reference system; e.g. gyro.
- Environmental reference system; e.g. wind sensor.
- Ship motion reference system; e.g. MRU.
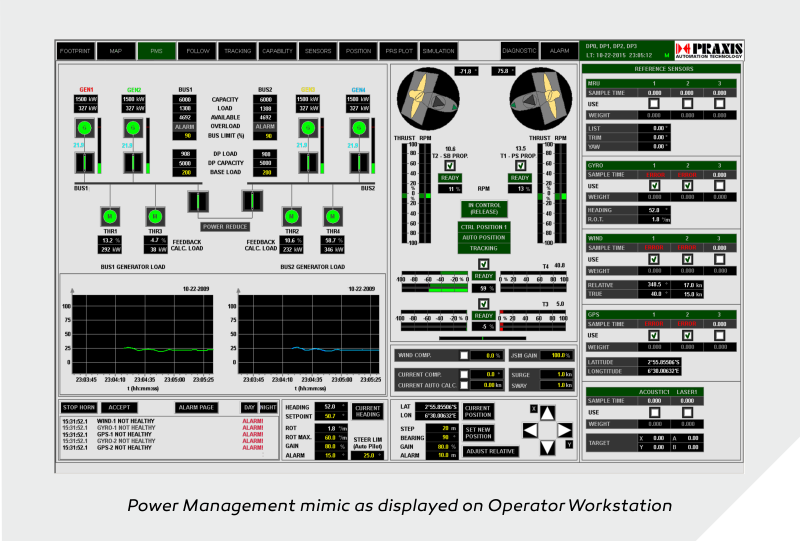
Interface with PMS
An interface is provided to the Power Management System in order to request for sufficient electrical power in case the vessel is controlled by the Dynamic Positioning System. At the same time, the Mega-Guard Dynamic Positioning System will make sure that the thrusters do not consume more power than available, in order to prevent a blackout.
DPO Training System
 The Mega-Guard DPO Training System is supplied in accordance with the rules of the Nautical Insititute and DNV. The Mega-Guard DPO Training System is a full DP Bridge simulator which is supplied in 3 different classes fulfilling the rules of Class A, Class B and Class C DPO training system,
The Mega-Guard DPO Training System is supplied in accordance with the rules of the Nautical Insititute and DNV. The Mega-Guard DPO Training System is a full DP Bridge simulator which is supplied in 3 different classes fulfilling the rules of Class A, Class B and Class C DPO training system,
The Class A Training System includes a DP2 set-up including individual thruster controls and an outside view with 65" TFT screens providing an outside view of 240 degrees.
Class B includes a DP2 set-up and an outside view of 120 degrees.
Class C includes a single DP workstation with built-in simulator and trainer and optionally an outside view.
Mega-Guard DP0 Block Diagram
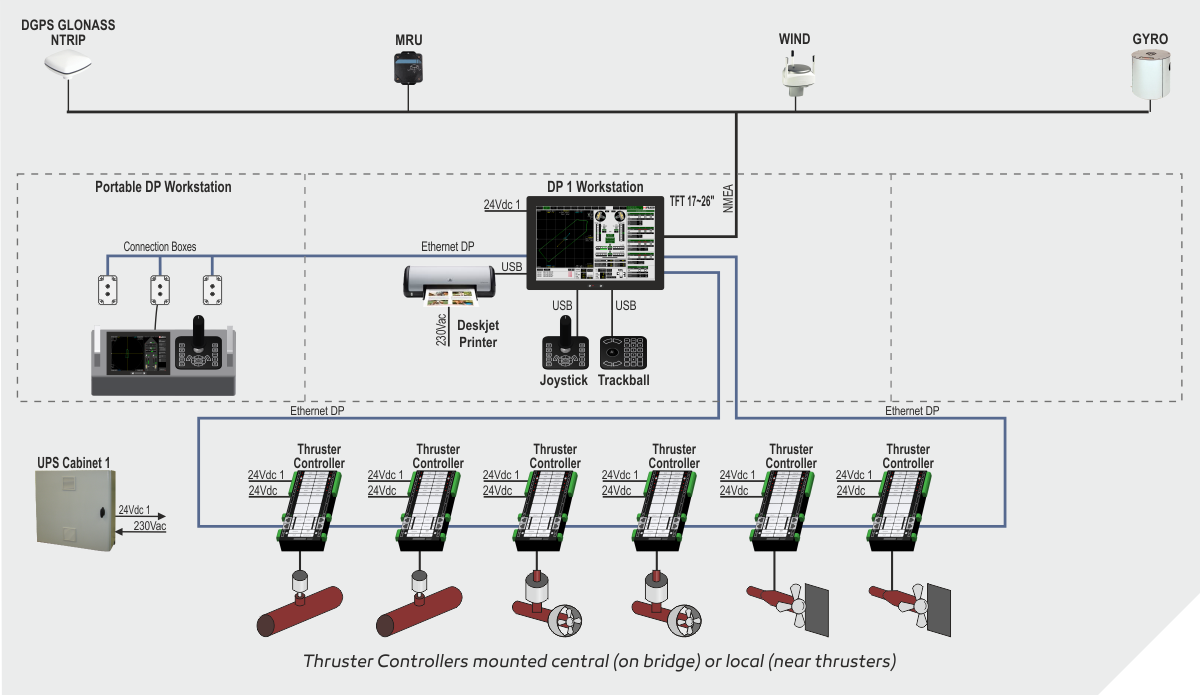
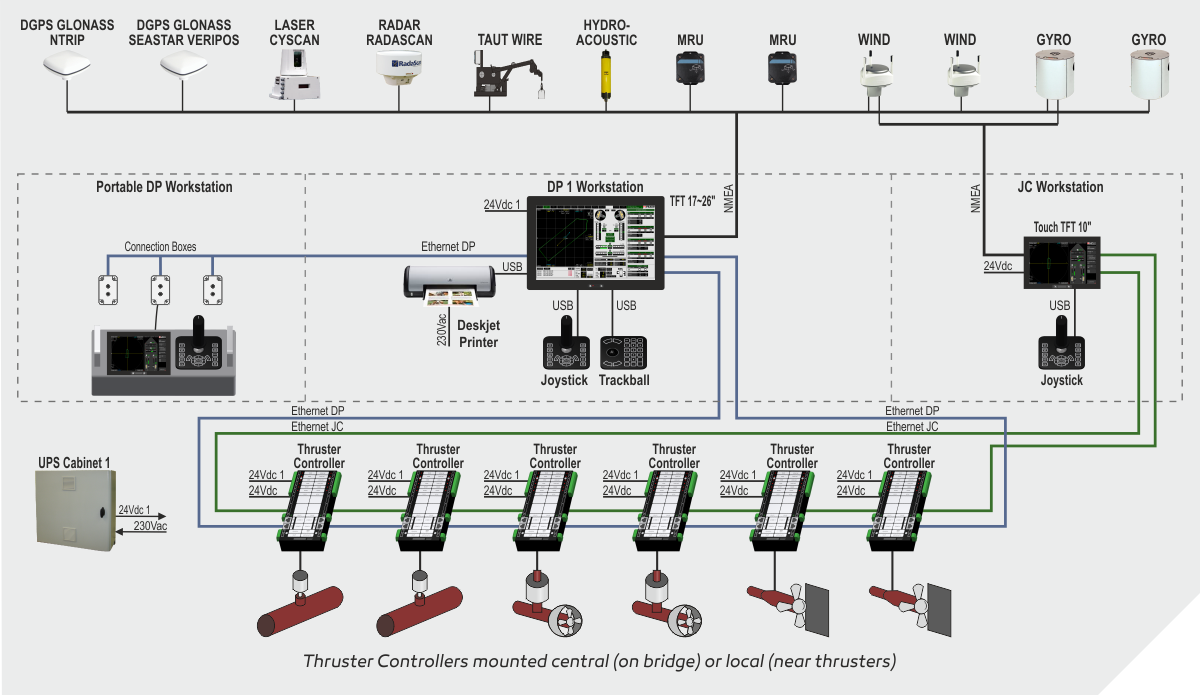
Mega-Guard DP1 Block Diagram
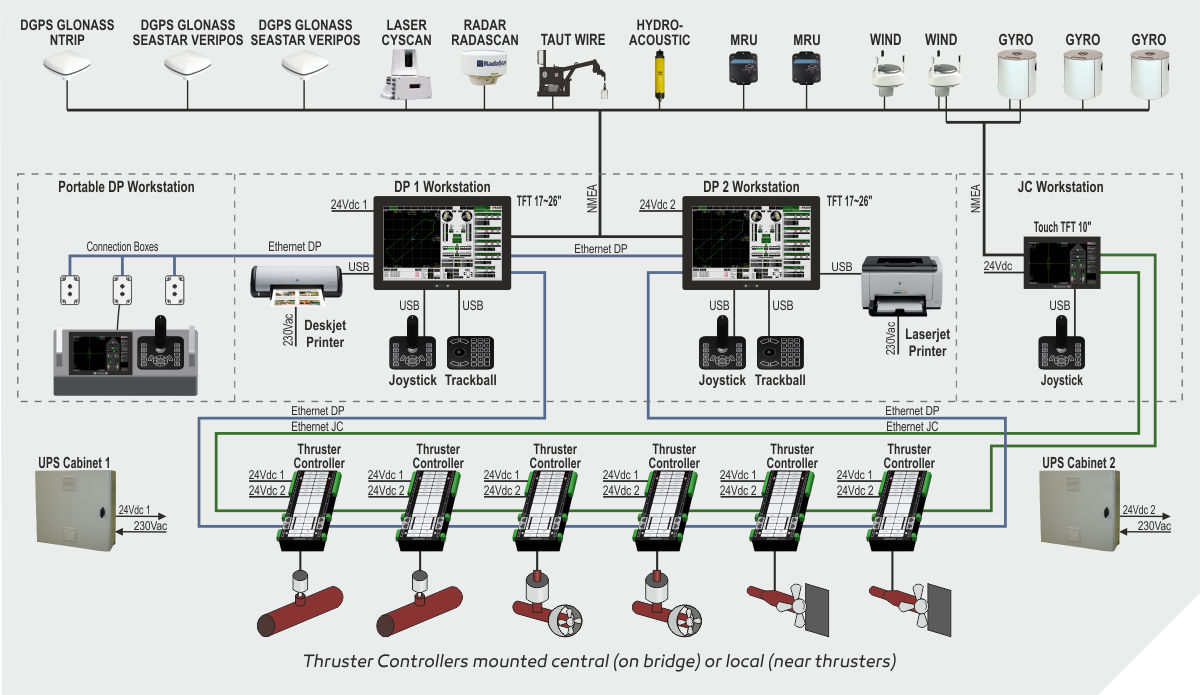
Mega-Guard DP2 Block Diagram
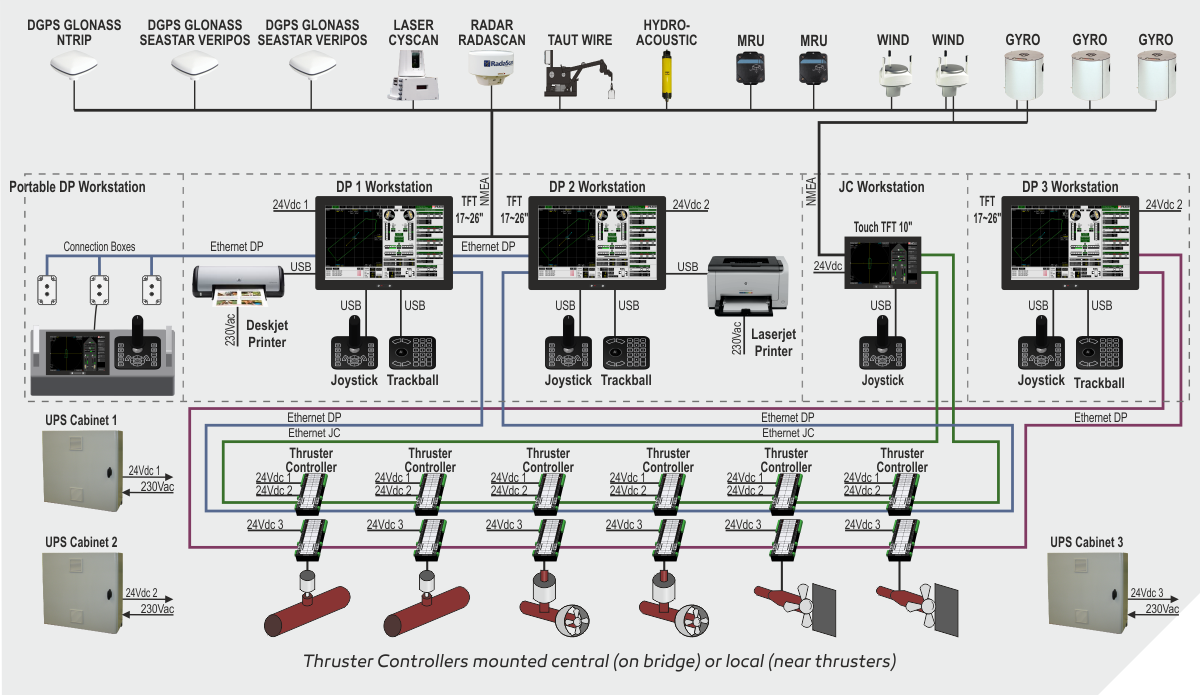
Mega-Guard DP3 Block Diagram
Position Reference System
 Overview Position Reference
Overview Position Reference
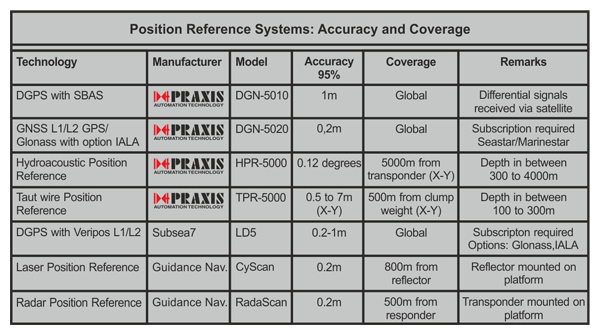
The following Mega-Guard DP Position Reference Systems (PRS) are available:
- DGPS with SBAS (DGN5010)
- GNSS L1/L2 GPS/Glonass with option IALA (DGN5020)
- Hydroacoustic Position Reference (HPR-5000)
- Taut wire Position Reference (TPR-5000)
Third party position reference systems like DGPS with Veripos and position reference systems based on laser and radar are supported as well.
The Mega-Guard DP system supports up to 16 different position reference systems. The final position is calculated taking into account the reliability, accuracy and weighing factor of each position reference system.
GNSS L1/L2 GPS/Glonass with SBAS and Fugro Marine-/Seastar
The Mega-Guard GNSS position reference system is a cost effective GNSS solution to reach sub-meter accuracy with global coverage and with Marinestar/Seastar subscription. The Mega-Guard GNSS consists of a smart antenna with built-in electronics and a connection box mounted in bridge console. The GNSS can be operated from the DP Workstation or from a separate GNSS Workstation (option).
Specification:
- L1, L2, SBAS and Marinestar/Seastar L band
- GPS and Glonass
- 270 receiver channels
- Real time update of 5 times per second.
- Upgradable to Galileo
- Position and quality indication on DP Workstation or on GNSS Workstation
- Accuracy with GPS and Glonass: 2.5m
- Accuracy with SBAS: 0.6m
- Accuracy with Marinestar/Seastar: 0.2m
Note: accuracies specified with 2DRMS (95%) probability

Laser and Radar Position Reference
 The Mega-Guard Dynamic Positioning System supports Laser and Radar Position Reference Systems from Guidance Marine. The Cyscan is a laser position reference system. It measures the range and bearing of reflective targets allowing the Cyscan to calculate the positon and heading relative to the target reflector on another vessel or structure. The Cyscan is supplied as deck unit and various type of reflectors are vailable. The (mini) RadaScan is a radar position reference system. The RadaScan accurately measures the range and bearing of one or more intelligent microwave targets called responders, allowing for the calculation of vessel position and heading relative to the target responder on another vessel or structure.
The Mega-Guard Dynamic Positioning System supports Laser and Radar Position Reference Systems from Guidance Marine. The Cyscan is a laser position reference system. It measures the range and bearing of reflective targets allowing the Cyscan to calculate the positon and heading relative to the target reflector on another vessel or structure. The Cyscan is supplied as deck unit and various type of reflectors are vailable. The (mini) RadaScan is a radar position reference system. The RadaScan accurately measures the range and bearing of one or more intelligent microwave targets called responders, allowing for the calculation of vessel position and heading relative to the target responder on another vessel or structure.
Hydroacoustic and Taut Wire Position Reference
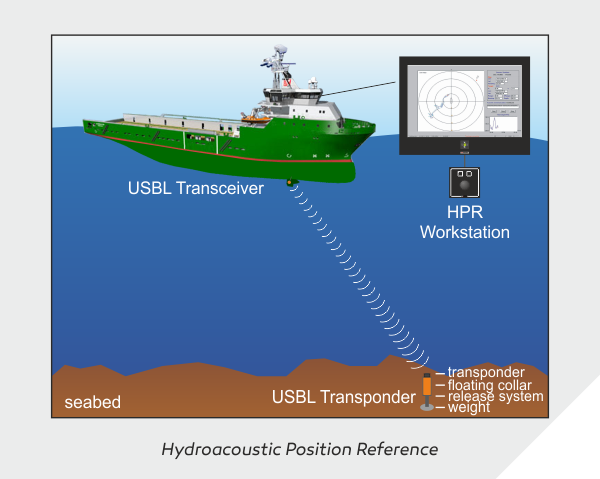 Hydroacoustic Position Reference
Hydroacoustic Position Reference
The Mega-Guard Hydro Acoustic Position Reference (HPR) is applied as a cost effective and highly accurate position reference system for the Mega-Guard Dynamic Positioning System. The position of the seabed USBL Transponders are used as reference points for the ship mounted USBL Transceiver. The MRU-INS, gyro and optional DGPS are connected to the HPR as well Workstation. The HPR Workstation accurately calculates the relative position of the vessel taking into account the data as received from the USBL Transceiver, MRU-INS, gyro and optional DGPS. The USBL Transponder contains a release mechanism with floating collar for recovery of the transponder from the seabed.
The Mega-Guard Hydro Acoustic Position Reference consists of the following components:
 HPR Workstation providing a user friendly man-machine interface
HPR Workstation providing a user friendly man-machine interface- USBL Transceiver with 5000 meter range
- USBL Transponders for 4000 meter water depths
- Motion Reference Unit
- Control Cabinet
The USBL Transceiver can be mounted in two different ways:
- Hull mounted with gate valve and deployment machine
- Pole mounted with over-the-side pole
Taut Wire Position Reference
 The Mega-Guard Taut Wire Position Reference (TPR) is applied as position reference system for the Mega-Guard Dynamic Positioning System. The taut wire deck winch is deck mounted at port or starboard side of the vessel. The Mega-Guard TPR is very accurate, reliable and maintenance free as it is constructed as a full electric device (no hydraulics used for Winch). The Mega-Guard Taut Wire Position Reference consists of the following components:
The Mega-Guard Taut Wire Position Reference (TPR) is applied as position reference system for the Mega-Guard Dynamic Positioning System. The taut wire deck winch is deck mounted at port or starboard side of the vessel. The Mega-Guard TPR is very accurate, reliable and maintenance free as it is constructed as a full electric device (no hydraulics used for Winch). The Mega-Guard Taut Wire Position Reference consists of the following components:
- Taut Wire Deck Winch with a 500 meter long / 6mm thick steel cable and clumb weight. The clumb weight is lowered to the seabed and the cable is put to constant tension. The deck winch includes a Taut wire Operator Panel, with an LCD display and pushbuttons for local operation. The relative position, bearing and the tension of the steel cable are displayed on the LCD display.
- Taut Wire Control Cabinet, with control electronics for the deck winch and a TPR Controller. The TPR Controller controls the deck winch and calculates the relative position of the ship taking into account the input from the Motion Reference Unit for compensating the roll and pitch off the vessel.
- Taut Wire Operator Panel, for flush panel mounting in bridge console, with an LCD display and pushbuttons for bridge operation.
View a list of our worldwide sales and service network.
Praxis Automation Technology
Zijldijk 24A,
2352 AB Leiderdorp
The Netherlands
+31 (0)71 5255 353
Spare parts:
parts@praxis-automation.com
Information/questions:
info@praxis-automation.com
More contact details